การทำงานของ AFM แบบ Tapping Mode
Tapping Mode
ในเทคนิคทางเลือกนี้ซึ่งแตกต่างจาก non-contact mode, cantilever จะสั่นอยู่เหนือพื้นผิวอีกครั้ง แต่มี amplitude ของการสั่นที่สูงกว่ามาก การสั่นที่มีขนาดใหญ่ขึ้นทำให้สัญญาณการโก่งตัว (deflection signal) มีขนาดมากพอสำหรับวงจรควบคุม (control circuit) ส่งผลให้สามารถควบคุม topography feedback ได้ง่ายขึ้น
แม้เทคนิคนี้จะให้ผลลัพธ์ของ AFM ในระดับปานกลาง แต่การสั่นที่มีขนาดใหญ่จะทำให้ปลายหัววัด (tip) สึกหรือทู่เร็วขึ้น ซึ่งในที่สุดจะเร่งให้ความละเอียดของภาพ (imaging resolution) ลดลงเร็วกว่าปกติ
Tapping mode เป็นเทคนิคแบบไดนามิกของ AFM (Dynamic AFM technique) ที่ใช้ในการสร้างภาพ topography ของตัวอย่าง โดยการสแกนพื้นผิวด้วย cantilever ที่มีการสั่น
เช่นเดียวกับโหมด True Non-contact ของ Park Systems, Tapping mode ใช้ amplitude ของการสั่นของ cantilever เพื่อตรวจจับการเปลี่ยนแปลงของแรงระหว่าง tip–sample interaction forces และจากนั้นนำมาสร้างเป็นภาพ topography ของตัวอย่าง อย่างไรก็ตาม ใน Tapping mode การสั่นของ cantilever จะมี amplitude ที่มากกว่า เมื่อเทียบกับ True Non-contact mode และปลายหัววัด (tip) จะสัมผัสกับพื้นผิวของตัวอย่างเป็นระยะ ๆ (intermittent contact) ระหว่างการวัด Amplitude จะถูกใช้เป็นสัญญาณสำหรับ topography feedback, ในขณะที่ phase lag ระหว่างสัญญาณขับเคลื่อน (drive) และสัญญาณที่ตรวจจับได้ (detected signal) จะบ่งบอกถึงคุณสมบัติทางกลของวัสดุที่เฉพาะเจาะจง
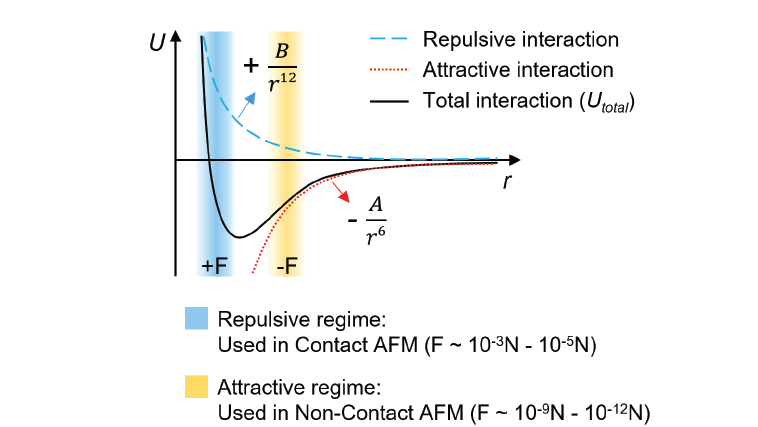
รูปที่ 1 แสดงกราฟศักย์พลังงานระหว่างอะตอม (interatomic interaction potential) ที่เรียกว่า Lennard-Jones potential ซึ่งใช้เป็นแบบจำลองโดยประมาณสำหรับแรงระหว่าง tip–sample เมื่อระยะห่างระหว่างอะตอมสั้น แรงที่มีอิทธิพลจะเป็นแรงผลักระยะสั้น (short-ranged repulsive forces) ซึ่งส่วนใหญ่เกิดจาก Pauli repulsion ที่ป้องกันไม่ให้กลุ่มเมฆอิเล็กตรอนของ tip และ sample ซ้อนทับกัน และเมื่อระยะห่างมากขึ้น แรงดึงดูด van der Waals forces จะมีอิทธิพลเหนือกว่า ซึ่งมีที่มาจากการเกิด dipole–dipole interactions
รูปที่ 1 แสดงกราฟศักย์พลังงานระหว่างอะตอม (interatomic interaction potential)
รูปที่ 1. ศักย์พลังงานระหว่างอะตอม (Interatomic interaction potential, U) เทียบกับระยะห่าง (distance, r) ซึ่งใช้เป็นแบบจำลองโดยประมาณสำหรับแรงระหว่าง tip–sample interaction เส้นสีน้ำเงินแสดงถึงแรงที่มีลักษณะเป็น แรงผลัก (purely repulsive interaction) โดยสมบูรณ์ ส่วนเส้นสีแดงแสดงถึงแรงที่เป็น แรงดึงดูด (purely attractive interaction) โดยสมบูรณ์ เส้นสีดำเป็นการรวมกันของแรงดึงดูดระยะยาว (long-range attractive) และแรงผลักระยะสั้น (short-range repulsive) ซึ่งเรียกว่า Lennard-Jones Potential เมื่อระยะห่างระหว่างอะตอมมาก แรงสุทธิจะเป็น แรงดึงดูด (-F) แต่เมื่ออะตอมทั้งสองถูกนำมาใกล้กันมากขึ้น แรงสุทธินั้นจะเปลี่ยนเป็น แรงผลัก (+F)
Tapping mode ทำงานอยู่ในช่วงรอยต่อระหว่าง แรงผลัก (repulsive force regime) และ แรงดึงดูด (attractive force regime)
แตกต่างจากการวัดในโหมด True Non-contact, ซึ่งทำงานอยู่เฉพาะในช่วงของ แรงดึงดูด (attractive force regime) เท่านั้น, โหมด Tapping mode เป็นโหมดแบบ intermittent contact ที่ปลายหัววัด (tip) จะสัมผัสกับพื้นผิวที่จุดกลับตัวล่าง (lower turning point) ของการสั่น และด้วยเหตุนี้จึงเข้าสู่ช่วงของ แรงผลัก (repulsive force regime)
สำหรับการสั่นในโหมด Tapping mode, cantilever จะถูกขับให้สั่นใกล้กับ ความถี่เรโซแนนซ์ (resonance frequency, f₀) โดยที่ค่าความถี่เรโซแนนซ์ของ cantilever ถูกกำหนดโดย ค่าคงที่สปริงภายใน (intrinsic spring constant, k₀) และ มวล (mass, m) ตามที่แสดงในสมการ (1) เมื่อ cantilever เคลื่อนเข้าใกล้พื้นผิวของตัวอย่าง ความถี่เรโซแนนซ์จะเกิดการเปลี่ยนแปลง ซึ่งเกิดจากการเปลี่ยนแปลงของค่าคงที่สปริงจากค่าภายใน (intrinsic spring constant, k₀) ไปเป็น ค่าคงที่สปริงเชิงประสิทธิผล (effective spring constant, k_eff) โดยเขียนได้ดังนี้:
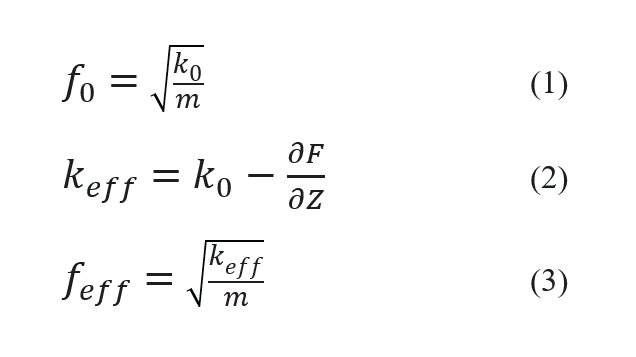
เมื่อระยะห่างระหว่าง tip–sample มีค่ามาก ซึ่งแรงดึงดูด (attractive forces) เป็นตัวครอบงำ ค่าความชันของแรง (force gradient, F' = ∂F/∂Z) จะเป็นบวก และค่าคงที่สปริงเชิงประสิทธิผล (k_eff) จะมีค่าน้อยกว่า k₀ ตามสมการ (2) อย่างไรก็ตาม เมื่อเกิด แรงผลัก (repulsive tip–sample interaction) ใกล้กับพื้นผิว ค่าของ k_eff จะมากกว่า k₀ ในโหมด Tapping mode, การเปลี่ยนแปลงของค่าคงที่สปริงเชิงประสิทธิผล (k_eff) และการเลื่อนของความถี่เรโซแนนซ์ (resonance frequency shift) จะถูกตรวจจับในรูปแบบของการเปลี่ยนแปลงของ amplitude การสั่น การตรวจจับการเปลี่ยนแปลงของ amplitude นี้มีความไวต่อระยะห่างระหว่าง tip–sample มากกว่าการตรวจจับการโก่งตัวแบบสถิตของ cantilever
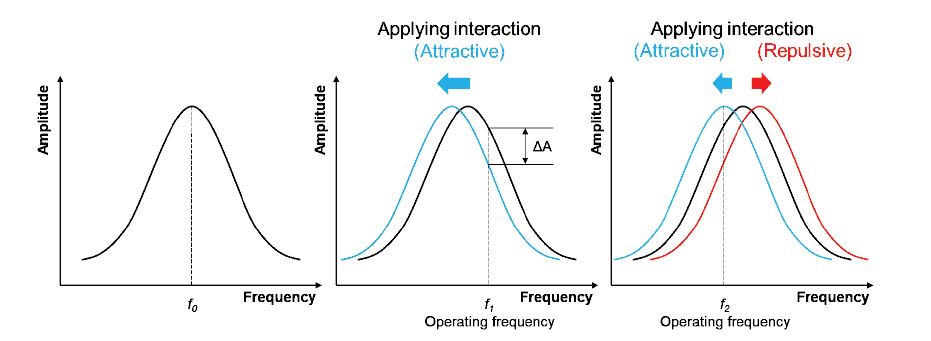
เพื่อให้เกิดการสั่นทางกลของ cantilever, จะใช้ piezo-element ที่สามารถสร้างการสั่นได้ในช่วงความถี่กว้างในการขับเคลื่อน cantilever ความถี่เรโซแนนซ์ (f₀) ของ cantilever จะถูกระบุโดยการกวาดความถี่ของ piezo ที่ใช้ขับ (drive piezo) ไปในช่วงหนึ่ง ซึ่งจะสังเกตเห็นยอดสัญญาณเด่นชัดเมื่อถึงจุดเรโซแนนซ์ รูปที่ 2 แสดงความสัมพันธ์ระหว่าง amplitude ของ cantilever และ drive frequency ของ cantilever ที่ความถี่เรโซแนนซ์ในกรณีต่าง ๆ ได้แก่ (a) ไม่มีแรงระหว่าง tip–sample interaction, (b) โหมด True Non-contact ของ Park ที่ทำงานในช่วงแรงดึงดูด (attractive force regime) ซึ่งทำให้ความถี่เรโซแนนซ์เลื่อนไปยังค่าที่ต่ำกว่า (เส้นสีน้ำเงิน), และ (c)
โหมด Tapping mode ที่ทำงานในช่วงแรงดึงดูดและแรงผลัก (attractive and repulsive force regime) ซึ่งทำให้เกิดการเลื่อนของความถี่ทั้งไปยังค่าที่ต่ำกว่าและสูงกว่า (แสดงด้วยสีน้ำเงินและสีแดงตามลำดับ) การเปลี่ยนแปลงของ amplitude การสั่น ที่ตรวจจับได้จะแสดงเป็น ΔA
รูปที่ 2 แสดงความสัมพันธ์ระหว่าง amplitude ของ cantilever และ drive frequency ของ cantilever ที่ความถี่เรโซแนนซ์ในกรณีต่าง ๆ
สำหรับโหมด True Non-contact, ความถี่ในการทำงานหรือความถี่ขับเคลื่อน (operating or drive frequency, f₁) จะมีค่ามากกว่า f₀ เล็กน้อย (ดูรูปที่ 2(b)) ตามที่แสดงในสมการ (2) และ (3) ค่าคงที่สปริงเชิงประสิทธิผล (k_eff) จะลดลงเมื่อเทียบกับ k₀ เนื่องจากแรงดึงดูด (attractive force) ซึ่งทำให้ความถี่เรโซแนนซ์ (resonance frequency) เลื่อนไปยังค่าที่ต่ำกว่า และทำให้เกิดการเปลี่ยนแปลงของ amplitude การสั่น (ΔA) ในทิศทางลบที่ความถี่ f₁ ในทางกลับกัน สำหรับโหมด Tapping mode, ความถี่เรโซแนนซ์จะเลื่อนไปยังค่าที่ต่ำกว่าหรือสูงกว่าในแต่ละรอบของการสั่น ขึ้นอยู่กับว่าการมีปฏิสัมพันธ์เปลี่ยนจากช่วงแรงดึงดูดไปยังช่วงแรงผลัก (attractive → repulsive force regime) หรือไม่ โดยในกรณีนี้ ความถี่ในการทำงาน (operating frequency, f₂) มักจะต่ำกว่า f₀ เพื่อให้สามารถตรวจจับการเปลี่ยนแปลงของ amplitude (ΔA) ทั้งเชิงบวกและเชิงลบได้ ในช่วงแรงดึงดูดและแรงผลักตามลำดับ
โหมด Tapping mode ใช้ค่า amplitude การสั่น ที่ตรวจจับได้ที่ความถี่การทำงานเป็น สัญญาณป้อนกลับ (feedback signal) ระบบ feedback จะควบคุมการเคลื่อนที่ของ Z scanner ระหว่างการสร้างภาพ เพื่อชดเชยการเปลี่ยนแปลงของ amplitude และระยะห่างระหว่าง tip–sample เมื่อรักษา amplitude และระยะห่างให้คงที่ได้ Tapping mode จึงสามารถสร้างภาพ topography ของตัวอย่างจากการเคลื่อนที่ของ Z scanner ได้อย่างแม่นยำ
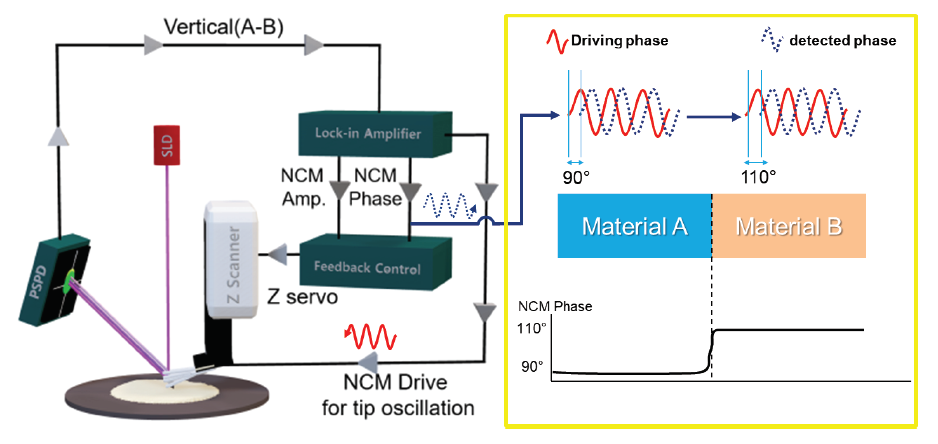
รูปที่ 3. แผนภาพเชิงโครงสร้างของระบบการทดลอง (schematic diagram of the experimental setup) สำหรับโหมด Tapping mode เฟส (phase) ระหว่างการสั่นของ cantilever ที่ตรวจจับได้และสัญญาณขับเคลื่อน (drive signal) จะให้ความแตกต่างของคอนทราสต์ระหว่างวัสดุต่างชนิดกัน และด้วยเหตุนี้จึงให้ข้อมูลเพิ่มเติมเกี่ยวกับการกระจายตัวของวัสดุ (material distribution) ภายในตัวอย่าง
นอกจากการวัด topography แล้ว โหมด Tapping mode ยังสามารถใช้สร้างภาพการกระจายตัวของสมบัติเชิงกลและสมบัติวัสดุ (mechanical and material distribution) ได้ผ่านสัญญาณเฟส (phase signal) เนื่องจากในการทำงานแบบสัมผัสเป็นช่วง ๆ (intermittent tip–sample contact) เฟสของการสั่นของ cantilever เมื่อเทียบกับสัญญาณขับเคลื่อน (drive signal) จะมีความไวต่อปฏิสัมพันธ์ระยะสั้นเฉพาะของวัสดุ เช่น elasticity, adhesion, และ stiffness (ดังแสดงในรูปที่ 3) ดังนั้น phase signal จึงสามารถใช้ในการแสดงภาพความไม่สม่ำเสมอของสมบัติเชิงกลและองค์ประกอบของวัสดุ (mechanical and compositional inhomogeneities) ภายในตัวอย่างได้ อย่างไรก็ตาม เนื่องจากมีปัจจัยหลายอย่างที่มีผลต่อสัญญาณเฟสในเวลาเดียวกัน การถ่ายภาพด้วยเฟส (phase imaging) จึงให้ข้อมูลเชิงคุณภาพเท่านั้น ไม่สามารถตีความเชิงปริมาณได้อย่างชัดเจน สำหรับการวิเคราะห์เชิงปริมาณในระดับนาโนของสมบัติเชิงกล (quantitative nanomechanical imaging) ให้ดูเพิ่มเติมในโหมด PinPoint nanomechanical mode ของ Park Systems
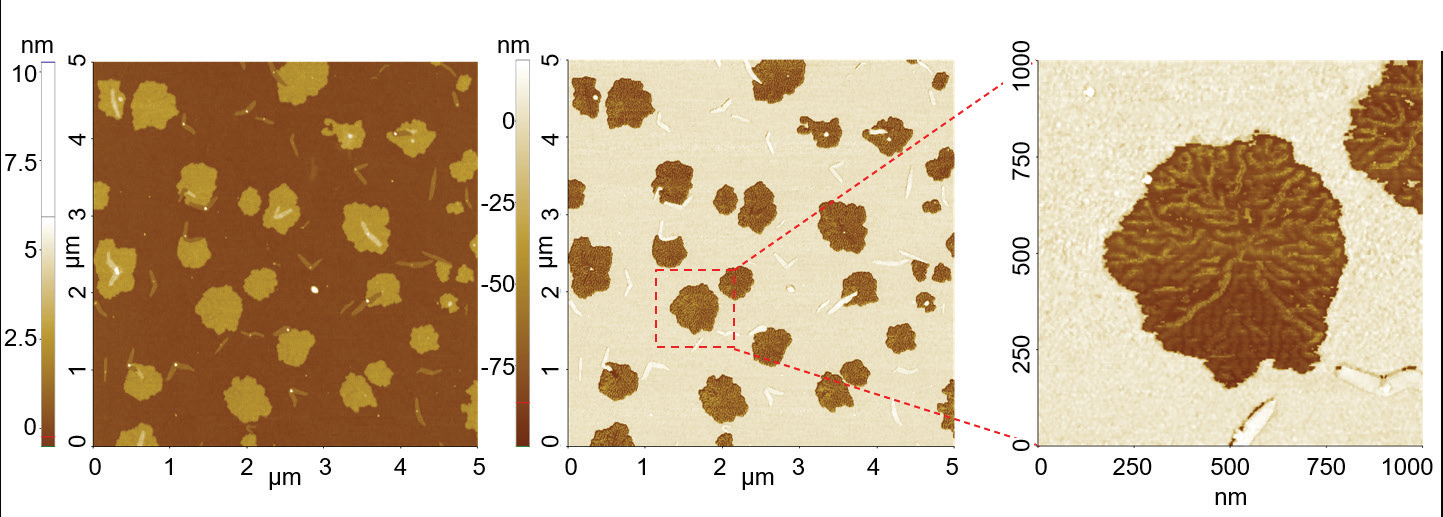
รูปที่ 4 แสดงผลการวัดด้วย Tapping mode บนการรวมตัวของโมเลกุลแบบ self-assembled
รูปที่ 4 แสดงผลการวัดด้วย Tapping mode บนการรวมตัวของโมเลกุลแบบ self-assembled ของสาร semi-fluorinated alkane F14H20 ที่อยู่บนแผ่นซับสเตรตซิลิกอน (silicon substrate) ภาพ AFM height (a) และ phase (b) แสดงให้เห็นกลุ่มการรวมตัวของโมเลกุลที่มีขนาดเส้นผ่านศูนย์กลางระหว่าง 200 nm ถึง 700 nm และมีความสูงประมาณ 4 nm เนื่องจากโครงสร้างของ F14H20 มีความนุ่มกว่าซับสเตรตซิลิกอน จึงสามารถแยกแยะได้อย่างชัดเจนในภาพเฟส การขยายภาพของสัญญาณเฟส (phase signal zoom) ยังเผยให้เห็นโครงสร้างย่อยแบบลามีลลา (lamellar substructures) ภายในกลุ่มโมเลกุลเหล่านี้อีกด้วย