การทำงานของ AFM แบบ Contact Mode
Contact Mode 
โหมดสัมผัส (Contact mode) เป็นวิธีที่ง่ายที่สุดในการได้มาซึ่งข้อมูล Topography ของตัวอย่าง topography signal จะมาจากตำแหน่งของตัวสแกนเนอร์แกน Z ซึ่งทำหน้าที่รักษาการโก่งตัวของ cantilever ให้คงที่บนพื้นผิวของตัวอย่าง
Contact mode เป็นโหมดการสร้างภาพมาตรฐานของ Atomic Force Microscopy (AFM) ที่สามารถให้ข้อมูล topography ของตัวอย่างได้หลากหลายประเภท
ใน contact mode การทำงานของระบบ feedback จะอาศัยการโก่งตัวของ cantilever bending ซึ่งใช้ spring constant ที่ต่ำ เพื่อลดความเสียหายของตัวอย่างให้น้อยที่สุด ระหว่างการสร้างภาพ scanner จะเคลื่อน tip ไปบนพื้นผิวของตัวอย่าง โดยแรงผลัก (repulsive contact forces) ระหว่าง tip และตัวอย่างจะทำให้ cantilever เกิดการโก่งตัว การโก่งตัวนี้สะท้อนถึงการเปลี่ยนแปลงของ surface topography ดังแสดงในภาพที่ 1 (a)
สำหรับรายละเอียดเพิ่มเติม สามารถดูได้จากกราฟ Lennard-Jones potential curve ในภาพที่ 1 (b) ซึ่งแสดงถึงความสัมพันธ์ของแรงระหว่าง tip–sample interactions ตามระยะห่าง เมื่ออะตอมชั้นนอกสุดของ tip และตัวอย่างเริ่มเข้าใกล้กัน พวกมันจะเริ่มดึงดูดกันด้วยแรงอ่อน ๆ แรงดึงดูดนี้จะเพิ่มขึ้นจนกระทั่งระยะห่างระหว่างอะตอมเล็กพอที่จะเกิด Pauli repulsion ระหว่างกลุ่มเมฆอิเล็กตรอนของพวกมัน เมื่อระยะห่างระหว่างอะตอมยังคงลดลง แรงผลักที่รุนแรงจะเข้ามาต้านแรงดึงดูดนี้อย่างรวดเร็ว สมดุลของแรงระหว่างอะตอมจะเกิดขึ้นเมื่อระยะห่างระหว่างอะตอมลดลงเหลือเพียงไม่กี่แองสตรอม ซึ่งมีขนาดใกล้เคียงกับความยาวของพันธะเคมี
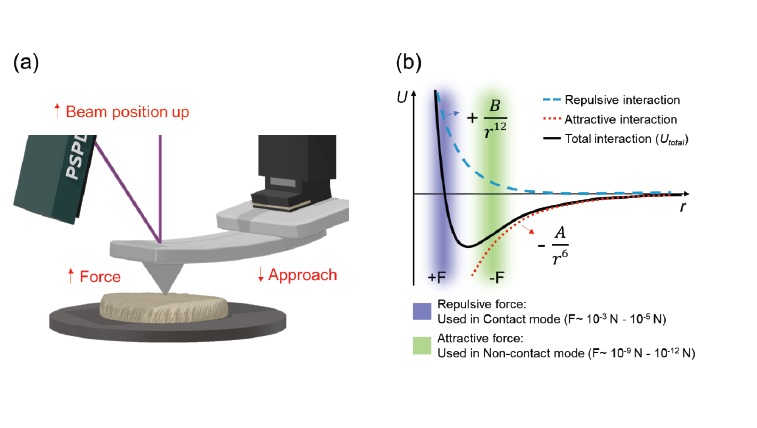
ภาพที่ 1. (a) การโก่งตัวของ cantilever | ภาพที่ 1(b) ความชันของกราฟพลังงานศักย์
ภาพที่ 1. (a) การโก่งตัวของ cantilever ที่เกิดจากแรงผลักแบบสัมผัส (repulsive contact forces) และ (b) ศักย์พลังงานของแรงระหว่างอะตอม (inter-atomic interaction potential, U) เมื่อเทียบกับระยะห่าง (distance, r )เส้นสีน้ำเงินแสดงถึงแรงที่เป็นแบบผลักล้วน (purely repulsive interaction) เส้นสีแดงแสดงถึงแรงที่เป็นแบบดึงดูดล้วน (purely attractive interaction) ส่วนเส้นสีดำเป็นการรวมกันของแรงดึงดูดระยะไกล (long-range attractive) และแรงผลักระยะใกล้ (short-range repulsive) ซึ่งเรียกว่า Lennard-Jones potential เมื่ออยู่ในระยะห่างมาก แรงสุทธิจะเป็นแรงดึงดูด (-F) แต่เมื่ออะตอมทั้งสองเข้าใกล้กันมากขึ้น แรงสุทธินี้จะเปลี่ยนเป็นแรงผลัก (+F) เมื่ออะตอมชั้นนอกสุดของ tip และ sample ค่อย ๆ เข้าใกล้กัน พวกมันจะเริ่มดึงดูดกันด้วยแรงอ่อน ๆ แรงดึงดูดนี้จะเพิ่มขึ้นเรื่อย ๆ จนกระทั่งระยะระหว่างอะตอมมีค่าต่ำพอที่จะเกิดแรงผลักแบบ Pauli repulsion ระหว่างกลุ่มเมฆอิเล็กตรอนของพวกมัน แรงผลักที่รุนแรงนี้จะเข้ามาต้านแรงดึงดูดอย่างรวดเร็วเมื่อระยะห่างยังคงลดลง แรงระหว่างอะตอมจะเข้าสู่สมดุลเมื่อระยะห่างลดลงเหลือเพียงไม่กี่แองสตรอม ซึ่งมีขนาดใกล้เคียงกับความยาวของพันธะเคมี อะตอมจะถือว่าอยู่ในสภาวะสัมผัสกันเมื่อแรงระหว่างอะตอมรวมมีค่าเป็นบวก (repulsive interaction regime) ดังที่แสดงในภาพที่ 1(b) ความชันของกราฟพลังงานศักย์ในช่วงแรงผลักจะสูงมาก (U ∝ r⁻¹²) ส่งผลให้แรงผลักนี้ถูกซ้อนทับกับแรงดึงดูดแบบ van der Waals การโก่งตัวขึ้นของ cantilever ซึ่งจะเพิ่มขึ้นตามค่ากำหนดแรง (force setpoint) ที่สูงขึ้น แสดงถึงการอยู่ในช่วงแรงผลักของการมีปฏิสัมพันธ์ระหว่าง tip–sample หากตั้งค่า force setpoint สูงเกินไป อาจทำให้เกิดความเสียหายต่อพื้นผิวหรือทำให้ปลายหัววัดสึก ขึ้นอยู่กับคุณสมบัติของ cantilever และตัวอย่าง ใน contact mode, cantilever จะออกแรงในแนวตั้งฉากกับพื้นผิว และการโก่งตัวของ cantilever จะเป็นสัดส่วนโดยตรงกับแรงที่กระทำ เมื่อการโก่งตัวมีค่าน้อย cantilever สามารถถือว่าเป็นสปริงแบบ Hookean ที่มีค่าคงที่สปริง (spring constant, k) มีหน่วยเป็น N/m
ขนาดของแรงที่ cantilever กระทำขึ้นอยู่กับค่าคงที่สปริงและค่า setpoint ซึ่งเป็นแรงอ้างอิงสำหรับระบบ feedback ที่ผู้ใช้งานตั้งค่าไว้ สำหรับระยะห่างระหว่าง tip–sample ที่กำหนดไว้ แรงเดียวที่เปลี่ยนแปลงได้คือแรงจาก cantilever ค่าคงที่สปริงของ cantilever สามารถวัดได้ง่ายในกล้อง Park AFM โดยใช้วิธี thermal tune method
เมื่อทราบค่าคงที่สปริงแล้ว การโก่งตัวที่วัดได้ (โดยทั่วไปในหน่วยนาโนเมตร) สามารถแปลงเป็นค่าแรงได้โดยตรง
Park AFM ตรวจจับการโก่งตัวของ cantilever ด้วยเทคนิค optical beam deflection
แผนภาพใน ภาพที่ 2 แสดงให้เห็นลำแสงจาก superluminescent diode (SLD) ที่สะท้อนจากด้านหลังของ cantilever ไปยัง position-sensitive photodetector (PSPD) เมื่อ cantilever โก่งตัว ตำแหน่งของลำแสงบน PSPD จะเปลี่ยนไป อัตราส่วนระหว่างระยะทางของลำแสง (จาก cantilever ถึง detector) ต่อความยาวของ cantilever ทำให้เกิดการขยายเชิงเรขาคณิต (geometric amplification) ผลลัพธ์คือ ระบบสามารถตรวจจับการเคลื่อนที่ในแนวตั้งของ cantilever ได้ในระดับต่ำกว่า หนึ่งแองสตรอม (sub-angstrom precision)
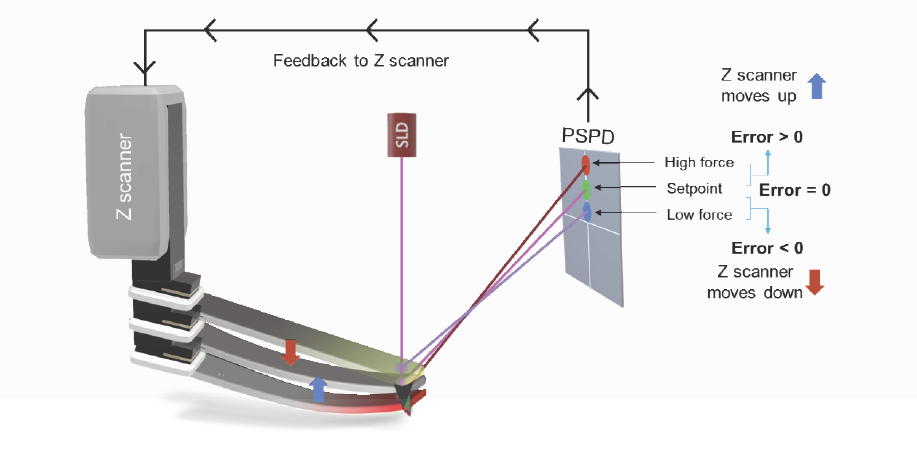
ภาพที่ 2. แผนภาพเชิงโครงร่าง (schematic diagram) ของการจัดตั้งระบบทดลองสำหรับ contact mode AFM
ภาพที่ 2. แผนภาพเชิงโครงร่าง (schematic diagram) ของการจัดตั้งระบบทดลองสำหรับ contact mode AFM การโก่งตัวของ cantilever จากตำแหน่งเริ่มต้น (ค่าที่ตั้งไว้หรือ setpoint) จะถูกบันทึกเป็นการเปลี่ยนตำแหน่งของจุดลำแสง (optical beam spot) บน PSPD สัญญาณความคลาดเคลื่อน (error signal) จะถูกนำมาใช้เป็นข้อมูล feedback สำหรับการเคลื่อนที่ของ Z scanner เพื่อปรับคืนค่ากลับไปยัง setpoint การตอบสนองของ Z scanner ต่อสัญญาณ error จะถูกบันทึกเป็นภาพภูมิประเทศ (topography image) ในขณะที่สแกนในทิศทาง x และ y ระหว่างการสแกนใน contact mode,
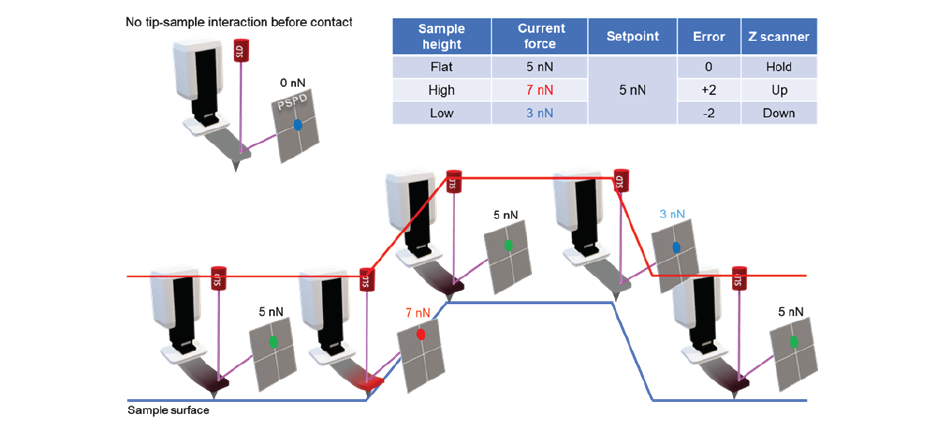
การโก่งตัวของ cantilever จะถูกควบคุมให้คงที่ที่ค่าที่ตั้งไว้ (setpoint) ระบบ Z scanner feedback จะปรับความสูงของ Z scanner เพื่อรักษาค่าดังกล่าวให้คงที่ ใน contact mode, สัญญาณ error สะท้อนถึงความแตกต่างระหว่างค่า setpoint และการเคลื่อนที่ในแนวดิ่งของจุดลำแสงบน PSPD ซึ่งทำหน้าที่เป็นข้อมูลนำเข้าสำหรับระบบ feedback (ดูภาพที่ 2) ภาพแผนผังการวัดใน contact mode แสดงไว้ในภาพที่ 3 โดยอิงจากสัญญาณ error ระบบ feedback จะปรับตำแหน่งของ Z scanner เพื่อให้สอดคล้องกับการเปลี่ยนแปลงของ topography จากนั้นข้อมูลการเคลื่อนไหวของ Z scanner จะถูกนำมาสร้างเป็นภาพภูมิประเทศของ AFM เนื่องจากการโก่งตัวของ cantilever ถูกควบคุมให้คงที่ตลอดการวัด แรงทั้งหมดที่กระทำต่อพื้นผิวตัวอย่างจึงคงที่เช่นกัน ใน contact mode, ความเร็วในการสแกนถูกกำหนดโดยการตอบสนองของระบบ Z scanner feedback ซึ่งจะปรับตามลักษณะภูมิประเทศของพื้นผิว เพื่อให้ได้ภาพความเร็วสูงที่มีคุณภาพดีที่สุด Park AFM ใช้ Z scanner ที่มีความเร็วสูง และตัวประมวลผลสัญญาณที่มีสัญญาณรบกวนต่ำ (low-noise signal processing controller) เพื่อให้สามารถสร้างภาพแบบ high-speed contact imaging ได้อย่างมีประสิทธิภาพ
ภาพที่ 3. แผนภาพเชิงโครงร่าง (schematic diagram) ของการจัดตั้งระบบทดลองสำหรับ tapping mode
ภาพที่ 3. แผนภาพเชิงโครงร่าง (schematic diagram) ของการจัดตั้งระบบทดลองสำหรับ tapping mode
การเปลี่ยนเฟส (phase shift) ระหว่างการสั่นของ cantilever ที่ตรวจวัดได้และสัญญาณขับเคลื่อน (drive signal) ทำให้เกิดความแตกต่างของคอนทราสต์ระหว่างวัสดุต่างชนิดกัน และด้วยเหตุนี้จึงให้ข้อมูลเพิ่มเติมเกี่ยวกับการกระจายตัวของวัสดุในตัวอย่าง
ตัวอย่างของภาพที่ได้จาก contact mode แสดงไว้ใน ภาพที่ 4 การสร้างภาพแบบ in-situ contact mode AFM ในของเหลวถูกใช้เพื่อติดตามการเปลี่ยนแปลงรูปร่างของผลึก calcite ระหว่างการเติบโตของผลึกพื้นผิวแตกตัว (104) ของ calcite ถูกสร้างภาพแบบภาพรวม (overview scan) ขนาด 45 μm × 45 μm ทันทีหลังจากสัมผัสกับสารละลาย Ca(OH)₂ ดังแสดงในภาพที่ 4 (a) จากนั้นการสแกนต่อเนื่องขนาด 500 nm × 500 nm ใน contact mode สามารถจับภาพการเติบโตของผลึกบนพื้นผิว calcite ได้ตลอดระยะเวลา 60 นาที ในสารละลาย Ca(OH)₂
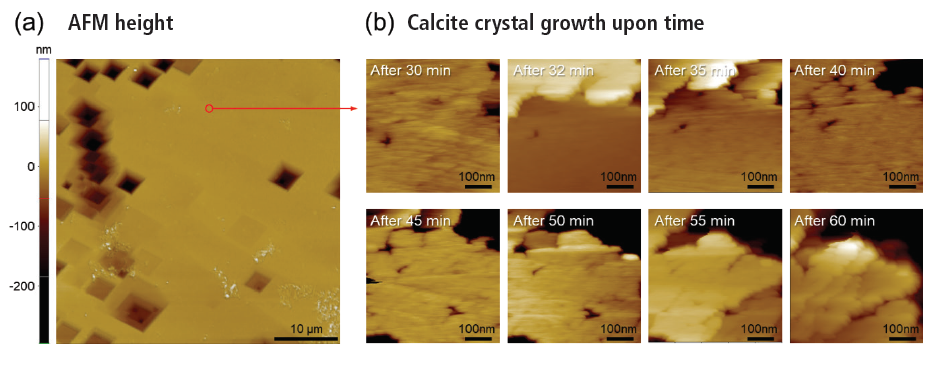
ภาพที่ 4. (a) ความสูงของภาพ AFM height จากการสแกนภาพรวมบนระนาบผลึก (104) calcite crystal plane และ (b) ภาพสแกนรายละเอียดสำหรับการสร้างภาพ in-situ ของการเติบโตของผลึกแคลไซต์ (calcite crystal growth) ที่ขึ้นอยู่กับระยะเวลาที่สัมผัสกับสารละลาย Ca(OH)₂
ขณะทำการสแกนใน contact mode, cantilever จะสร้างแรงเฉือน (shear forces) ขึ้นอย่างมีนัยสำคัญ ซึ่งอาจทำให้ตัวอย่างหรือปลายหัววัด (tip apex) เสียหายได้ ตัวอย่างที่บอบบางเป็นพิเศษ เช่น โมเลกุลที่ดูดซับบนพื้นผิว (adsorbed molecules), ตัวอย่างทางชีวภาพ (biological samples) และพอลิเมอร์ชนิดนิ่ม (soft polymers) จะได้ประโยชน์จากการใช้ non-contact mode ในการสร้างภาพ topography เนื่องจาก non-contact mode ทำงานในช่วงแรงดึงดูด (attractive force regime) จึงหลีกเลี่ยงแรงเฉือนได้ ซึ่งช่วยยืดอายุการใช้งานของ tip ได้อย่างมาก ดังนั้น non-contact mode จึงมักถูกแนะนำให้ใช้สำหรับการสร้างภาพ topography (สามารถดูรายละเอียดเพิ่มเติมได้ในหัวข้อ “Non-contact mode note”)
อย่างไรก็ตาม เทคนิค AFM ขั้นสูงหลายรูปแบบได้รับการพัฒนาขึ้นบนพื้นฐานของ contact mode เนื่องจากต้องอาศัยการสัมผัสระหว่าง tip–sample อย่างต่อเนื่อง เพื่อใช้วัดคุณสมบัติของพื้นผิวเพิ่มเติม เช่น conductivity, resistance, capacitance, piezoresponse, และ thermal behavior